| control_element.pdf |
control element
a) Transfer function
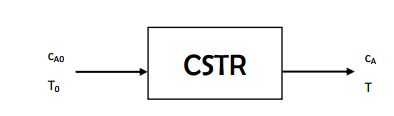
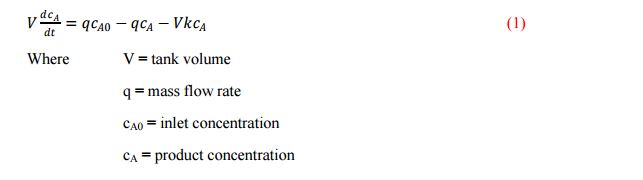
1. Unsteady-state component balances for species A (slurry)
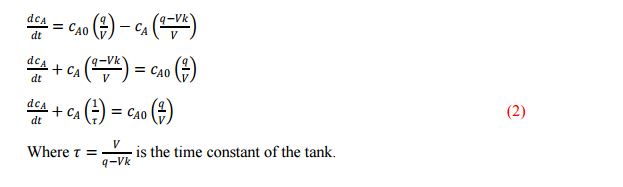
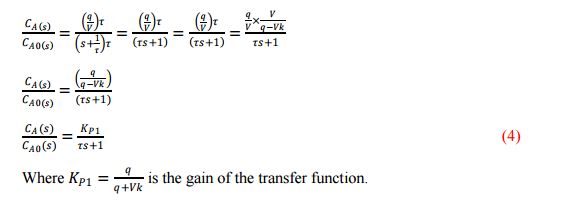
2. Rearrange equation (1) into:
3. By taking Laplace transform,
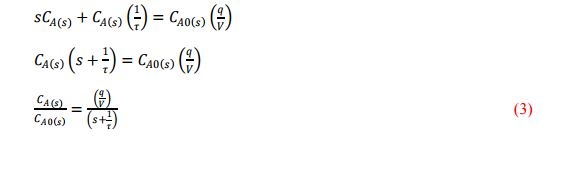
4. By multiplying the numerator and denominator of equation (4) with τ, the transfer function can be expressed as
5. Energy balance of the tank,
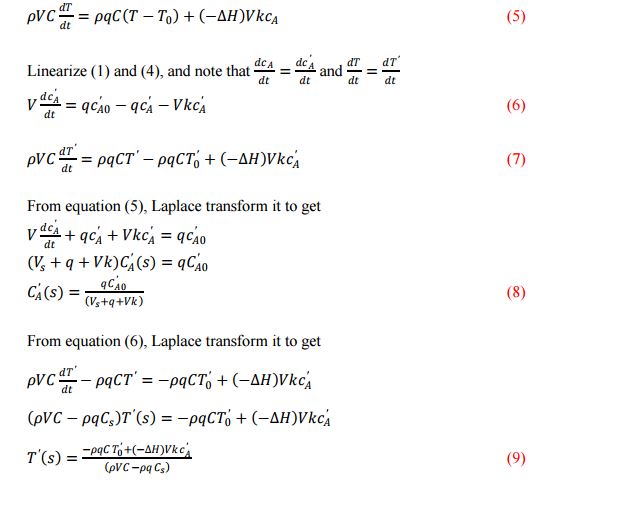
Therefore, the transfer function is

b) Order of reaction
The reaction is a first order reaction.
c) Variables
i. Controlled variables: Concentration of outlet, outlet temperature
ii. Manipulated variables: Biomass inlet flow rate (feed), heating rate of heaters
iii. Disturbance variables: Tank pressure, presence of catalyst.
d) Type of control algorithm
PID controller because it improves the closed loop stability. The effect of derivative action is to increase the damping in the response and generally improve the stability by reducing the settling time. Therefore, it is useful in reducing the oscillation caused by the integral action in the system response.
The reaction is a first order reaction.
c) Variables
i. Controlled variables: Concentration of outlet, outlet temperature
ii. Manipulated variables: Biomass inlet flow rate (feed), heating rate of heaters
iii. Disturbance variables: Tank pressure, presence of catalyst.
d) Type of control algorithm
PID controller because it improves the closed loop stability. The effect of derivative action is to increase the damping in the response and generally improve the stability by reducing the settling time. Therefore, it is useful in reducing the oscillation caused by the integral action in the system response.
